BIOMIMETIC BINOCULAR TECHNOLOGY

Product Introduction
Product Introduction




Andrew Parker, the author of "How Vision Triggered the Big Bang of Evolution: The Birth of the First Eye," believes that it is the eyes that have helped life, which has been dormant for 3.5 billion years, suddenly shine with unprecedented prosperity.
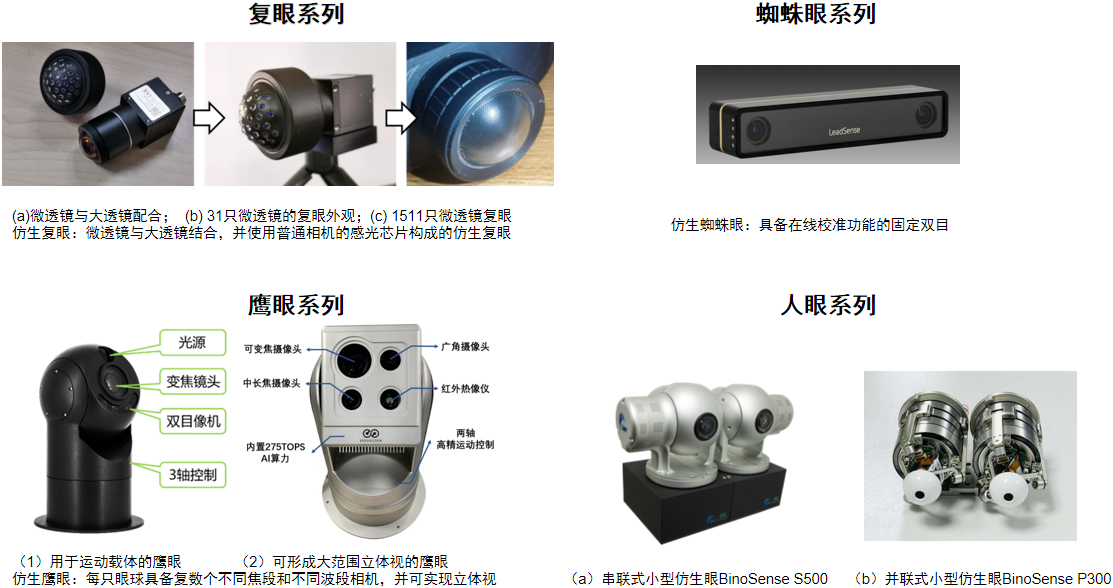
The eyes born in the Cambrian triggered the explosion of biological species. After more than 500 million years of evolution, they have become the most important sensory organs of most creatures, and are also known as the "most sophisticated and intelligent" works created by nature. In the Cambrian period, creatures had all kinds of eyes. Today, we can still see only four types of eyes: (1) compound eyes commonly used by insects; (2) The even number of relatively fixed monocles commonly used by Arthropod such as spiders; (3) The movable eyes of squid, octopus and other Mollusca; (4) The movable eyes possessed by the vast majority of vertebrates.
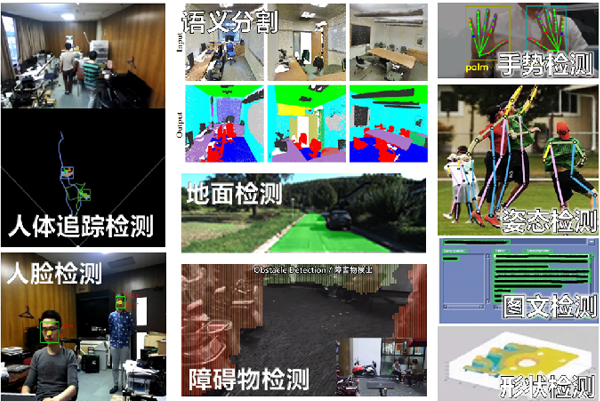
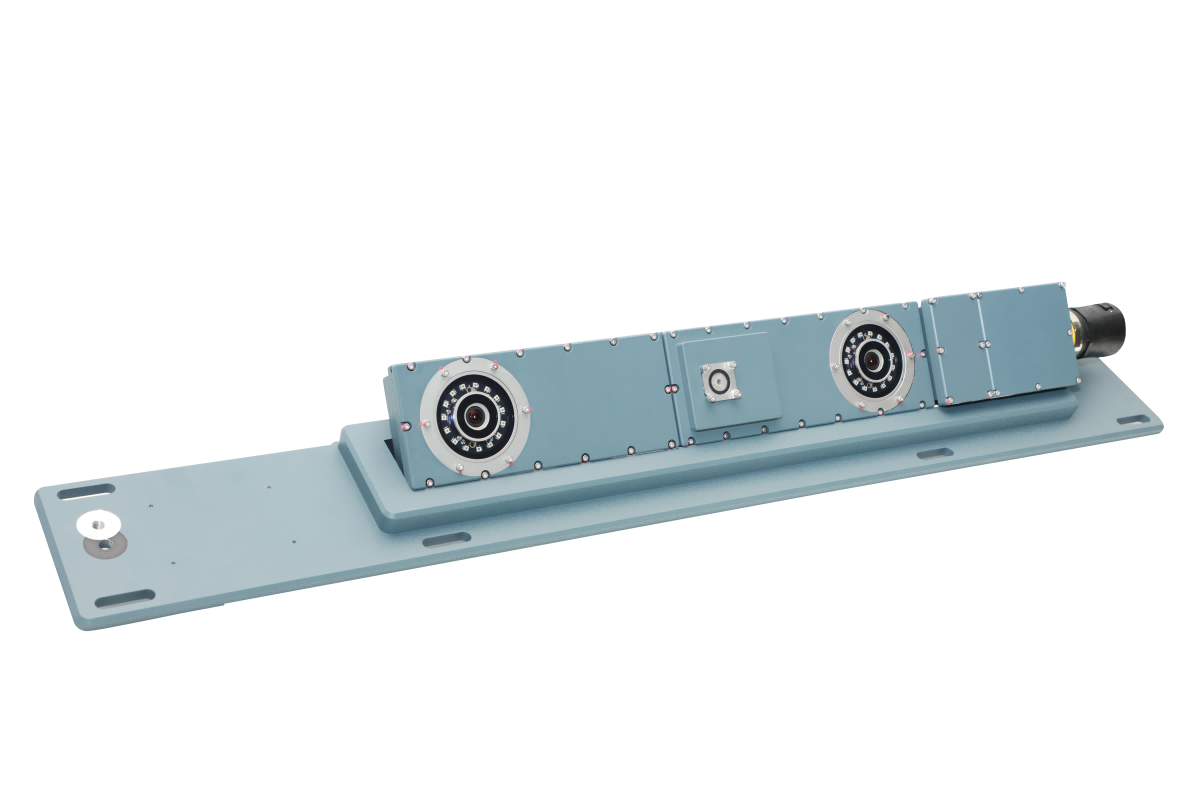
Our company's research and development team has developed three types of biomimetic eyes, except for octopus eyes: compound eyes (micro lens spherical array cameras), spider eyes (fixed binocular or multi eye cameras), and movable eyes: ① eagle eyes (long baseline dynamic multi focal segment camera sets), ② human eyes (dynamic binoculars, including biomimetic motion control systems and brain like processing decision systems). And achieved the industrialization of biomimetic spider eyes, especially biomimetic eagle eyes and biomimetic human eyes.
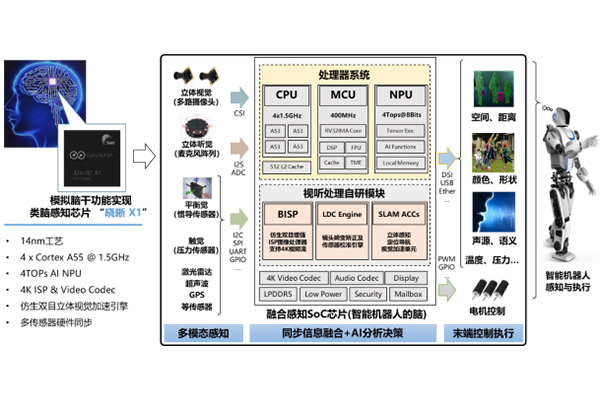
With more than 30 years of research history in the fields of robot vision, neurophysiology and Bionics, our team is in the international leading position in the field of bionic binocular technology. This technology starts with the study of the structure of the human eye and the physiological characteristics of its motion control nervous system, running through the mathematical models of biological vision systems, image processing, brain like frameworks, and intelligent decision-making, until the entire biomimetic eye system for motion control.
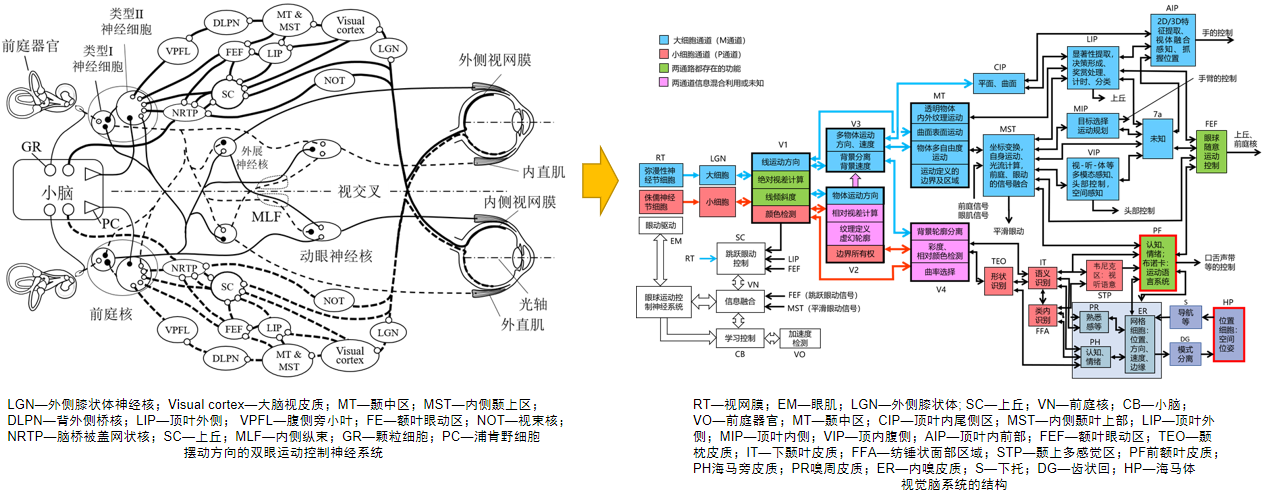
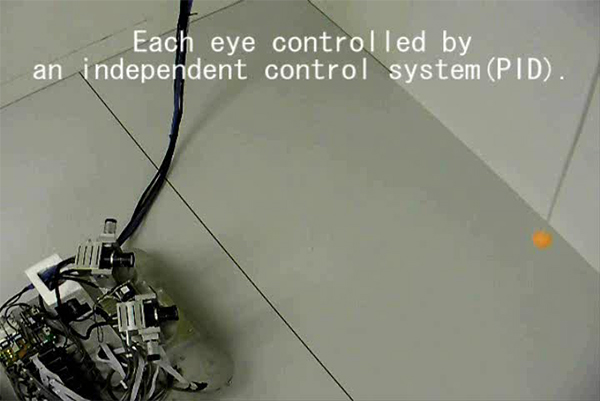
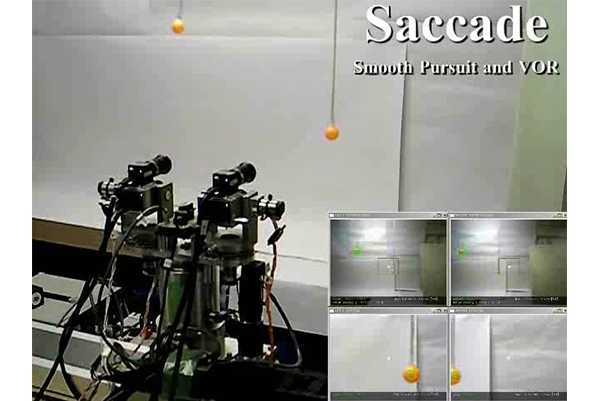
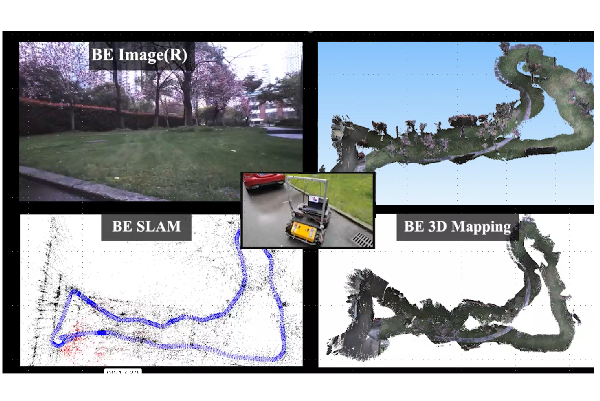
The company team imitated the neural topology structure between human eyes and the brain and established a biomimetic binocular control system model for robots. Like human eyes, this model simultaneously has various motion functions such as binocular cooperative motion, visual tracking, jumping eye movement, optomechanical reflex, vestibular eye reflex, and neck eye reflex. These functions are the foundation for stable target recognition and tracking of the human eye, This technology enables the robot's eyes to stably recognize and track targets in complex environments of vibration and turbulence.
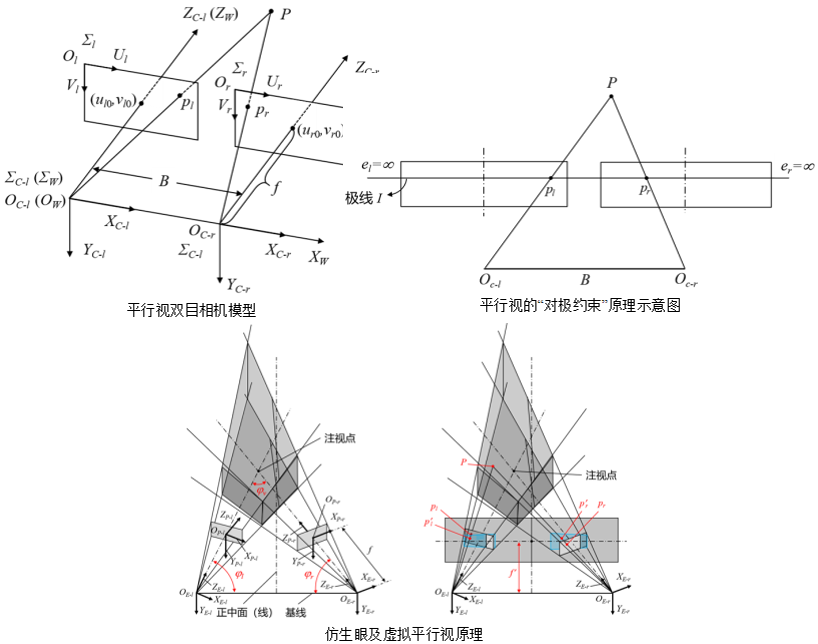
Due to avoiding the Zhang (Zhengyou) calibration method to achieve automatic calibration and solving the bottleneck problems of binocular stereo vision such as axial eye calibration and virtual parallel vision, our team is the only international research and development team that can achieve movable, focusing, and zoom binocular stereo vision systems.